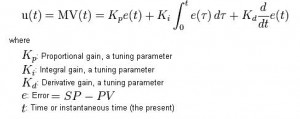
PID control is short for Proportional (P), Integrated (I) and Derivative (D) control. This is common in industrial control application. Control function for PID control is:
The formula looks formidable. But people use PID control in every day life. Driving is a daily example. Say your car speed is 45 MPH and you want to accelerate it to 70 MPH. The different of your target speed and your current speed of 35 MPH is the current error for PID control. You step on the gas paddle (control variable). The car accelerates. As the car gets closer to target, you let the accelerator up more and more. When you reach your target speed, you maintain your paddle position, because there is zero error.This is the proportional control. You also know intuitively that the longer you step on your accelerator, the faster the car goes. That’s the integral part, past action affect current process. During the speed up process, you notice that the car accelerates too fast so you let the accelerator up a little. This is the derivative part, you monitor the rate of change to adjust your control variable.